
خلال اجتماع عقد مؤخرا (2017) في مقر وكالة الفضاء الكندية Canadian Space Agency في لونجويل Longueuil ، كيو Que . طرح كين بودوالسكي Ken Podwalski صورة أراد أن يستغلها فريقه بأكمله.
لقد كانت الصورة للذراع الروبوتية دكستر Dextre ، وهي عبارة عن روبوت فضائي صنع في كندا ، وهو المتواجد في نهاية Canadarm2 وهو يظهر على العملة النقدية الكندية البالغة خمسة دولارات. التقط السيد بودوالسكي Podwalski لقطة مع دكستر Dextre في ديسمبر 2016 م ، أثناء ترقية نظام الطاقة في محطة الفضاء الدولية. ويظهر في الصورة مدي انشغال دكستر Dextre مع وجود بطارية في كل يد وواحد على الجانب.

للذراع الروبوتية دكستر Dextre و كندارم Canadarm2 – اضغط للتكبير
.
قال السيد بودوالسكي Podwalski ، مدير البرنامج الكندي للمحطة الفضائية: “انظر إلى ما نفعله الآن”. “تلك كل الروبوتات الخارجية”.
.
انضم السيد بودوالسكي Podwalski إلى الوكالة منذ أكثر من 20 عامًا ، عندما كان المهندسون يحلمون بكيفية عمل نظام آلي لخدمة المحطة الفضائية. في ذلك الوقت ، لم يتوقع أحد حتى الآن حجم العمل الذي يجب القيام به. كما هو الحال مع الجيل الأول من Canadarms التي حلقت على متن مكوك الفضاء Space Shuttle ، فإن مفتاح نجاح النظام سيثبت قدرته على تولي أدوار جديدة مع تغير احتياجات وأولويات برنامج الفضاء.
صورة متحركة Animation – الذراع الروبوتية علي متن مكوك الفضاء Space Shuttle
.
بدأت Canadarm عندما كانت شركة Spar Aerospace ، وهي شركة تورنتو انفصلت عن شركة Havilland Aircraft ، تبحث عن أعمال جديدة تمامًا ، كما كانت وكالة ناسا تتطلع إلى إشراك كندا في برنامجها الجديد لمكوك الفضاء. كانت ناسا مهتمة بالفعل بشركة DSMA Atcon ، وهي شركة أخرى في تورنتو Toronto ، قامت ببناء روبوتات لتحميل الوقود إلى المفاعلات النووية CANDU . كانت شركة سبار Spar قد بدأ في بناء هوائيات قابلة للتمديد Extendable Antennas للأقمار الصناعية. ومنذ وقت قريب ، كانت الشركتان تعملان كفريق واحد على اقتراح بناء نظام مناور لمكوك الفضاء space shuttle’s remote manipulator system – وهو جهاز يعمل بواسطة رائد فضاء والذي سيتم استخدامه لنشر الأقمار الصناعية من حاوية الشحن Cargo Bay الخاصة بالمكوك.
.
بتشجيع من المجلس القومي للبحوث National Research Council ، حصلت الحكومة الفيدرالية على هذه الخطة. كانت شركات الطيران والفضاء الأمريكية أقل حماسًا ، وتأمل بدلاً من ذلك في إنشاء ذراع يتم تصنيعها في الولايات المتحدة. لكن في تموز (يوليو) 1975 م ، تم إبرام الصفقة. ستوفر كندا ذراعًا للمكوك بواسطة شركة Spar كمقاول رئيسي. بالنسبة لشركة Spar ، كان المشروع قابلاً للتنفيذ بأكثر من طريقة: وقد يؤدي الفشل في مثل هذا المشروع الرفيع المستوى إلى إسقاط الشركة.
وقال السيد بودوالسكي Podwalski : “كان تخصصهم هو الأنظمة الكهروميكانيكية Electromechanical Systems التي تعمل في بيئة خطيرة للغاية”. ولكن من نقطة البداية تلك ، كان أمام مهندسي Spar طريق طويل لتطوير ذراع يمكنه القيام بما تحتاجه ناسا.
.
كان من بين أكثر الابتكارات إلهامًا التي ظهرت في الأيام الأولى “المستجيب النهائي End Effector” ، وهو في الأساس عبارة عن اليد التي تسمح للذراع بالتقاط الأشياء في الفضاء. أمام خيارات أكثر تعقيدًا وصعوبة مثل المخلب Claw أو القابض الميكانيكي Mechanical Gripper ، ابتكر المهندس فرانك مي Frank Mee نظامًا من ثلاثة كابلات Cables ضاقت مثل قزحية الكاميرا لتصيد هدفها. عندما جاءت الفكرة إليه لأول مرة ، قام ببناء نموذج في المنزل باستخدام الورق المقوى والخيوط لإقناع زملائه في Spar بأنها ستنجح.
.
وشملت التطورات الرئيسية الأخرى صندوق التروس للذراع Arm’s Gearbox ، والذي وفر حركة السوائل مع تقليل “رد الفعل العكسي Backlash” – وهو مصطلح هندسي للإرتباك Sloppiness أو اللعب بين المحركات Motors والمفاصل Joints .
قام بوب فيرجسون Bob Ferguson ، المهندس الذي عمل ذات مرة على سيارات سباق الفورمولا واحد Formula One ، بتطوير صندوق التروس Gearbox .
.
في فبراير 1981 ، تم قبول الذراع الأول رسميًا بواسطة ناسا في حفل أقيم في سبار Spar . في ذلك الوقت أطلق عليها رئيس المجلس النرويجي للاجئين لاركين كيروين Larkin Kerwin اسم “كندارم Canadarm“. لكن الانقلاب الحقيقي للعلامة التجارية سيأتي مع الرحلة الأولى للذراع في نوفمبر. عندما كان المكوك يدور في المدار وأبواب حاوية الشحن Cargo-Bay مفتوحة ، أظهرت كاميرته الذراع ، وثني الكوع ، مقابل الخلفية الدائرية البيضاء والزرقاء لكوكب الأرض ، مع شعار كندا – تم إضافته في مرحلة متأخرة – مزخرف بفخر على البطانية الحرارية Thermal Blanket البيضاء للذراع.
.
والأمر الأكثر أهمية هو أن الذراع عملت بشكل جميل ، وليس فقط للأقمار الصناعية Satellites ، ولكن ككاميرا على عصا يمكن توجيهها إلى أي شيء يود مراقبو مهمة المكوك رؤيته. في إحدى المرات في عام 1984 ، أثبت أنه مجرد شيء يقطع جزءًا مقلقًا من الجليد قبالة جانب مكوك الفضاء ديسكفري Discovery . ودفعت النجاحات ناسا NASA إلى طلب Canadarm لكل مكوك في أسطولها.
.
لا يزال مايك هيلتز Mike Hiltz ، المهندس الذي بدأ العمل في سبار Spar كطالب تعاوني op student في الثمانينيات ، يتذكر إثارة العمل مع النظام وتكييفه لمواجهة التحديات الجديدة ، مثل عندما كان بمثابة منصة لرواد الفضاء لإصلاح تلسكوب الفضاء هابل Hubble Space Telescope في عام 1993 م ، أو عند ضم أول جزئين من محطة الفضاء الدولية إلي بعضهما البعض ، وهي وحدة روسية Russian module مع عقدة للولايات المتحدة U.S. node ، في عام 1998 م .
.
وقال السيد هيلتز Hiltz ، وهو الآن مدير هندسة النظم في شركة MacDonald و Dettwiler and Associates Ltd. التي استحوذت على قسم الفضاء في شركة Spar في عام 2001 م : “لم نتوقف مطلقًا عن التطوير والتحسين”.
.
في رأيه ، كانت المهمة الأكثر إثارة للإعجاب التي طُلب من الذراع القيام بها هي المهمة التي لم يسبق لها مثيل في الحياة الواقعية: العمل كجسر بين مكّوكي فضاء في حال اضطرت ناسا إلى القيام بمهمة إنقاذ في المدار.
وقال “لقد قمنا بكل المحاكاة لإثبات أنك تستطيع القيام بذلك”. “تخيل ذراعًا مرنًا يبلغ وزنه 1000 رطل يحمل سيارتين تبلغ مساحتهما 250000 رطل مع رواد فضاء يتدافعون لأعلى ولأسفل.”
.
تطلب بناء Canadarm 2 و Dextre للمحطة الفضائية العديد من القفزات الفنية ، بما في ذلك نظام الرؤية Vision System ، وطريقة لاستشعار مقدار القوة Force التي يمكن تطبيقها بأمان أثناء العمل الدقيق ، والذراع التي يمكن أن تنفصل في أي من الطرفين وتتجول خارج محطة للوصول إلى أي مكان هناك حاجة إليها فيه. يطمس الذراع أيضًا الحدود بين الأرض والفضاء بطريقة نادراً ما ينظر إليها الجمهور. فبينما تركز وسائل الإعلام بشكل عام على رواد الفضاء الذين يعيشون ويعملون في المحطة ، فغالبًا ما لا يتم نفس التعامل مع الذراع الذي يتم تشغيله بواسطة واحد من تسعة مشغلين كنديين يجلسون في هيوستن Houston أو في مركز مراقبة وكالة الفضاء الكندية في لونجويل Longueuil .
صورة متحركة Animation – إطلاق كبسولة Cygnus للبضائع وتوجها إلى الأرض (اضغط لمعاينة الصورة)
.
صورة متحركة Animation – الذراع الروبوتية Canadarm لمحطة الفضاء تربط وحدة المعيشة الفضائية القابلة للنفخ BEAM inflatable module وتربطها بالعقدة Node 3 من المحطة الفضائية الدولية ISS .
.
وفي الوقت نفسه ، فإن أنظمة التحكم والتقنيات المطورة لـ Canadarm قد وجدت طريقها إلى تطبيقات أخرى عديدة ، بما في ذلك العمليات الجراحية التي تتم بمساعدة الروبوت.
.
ولكن مع بدء الولايات المتحدة ودول أخرى في التفكير فيما يأتي بعد المحطة الفضائية ، سواء كان سطح القمر أو الكويكبات القريبة أو مهمة إلى المريخ ، فمن الصعب تخيل أنه لن تكون هناك حاجة لنظام مثل Canadarm – ينبغي أن تختار كندا لملئه.
.
مكونات الذراع الروبوتية كندارم Canadarm2
نظام Canadarm ، أو نظام المناورة عن بعد للمكوك الفضائي Shuttle Remote Manipulator System SRMS ، هو عبارة عن جهاز يتم التحكم به عن بعد لنقل وتداول الحمولة ويتكون من عدد من الأجزاء .
.
- المفاصل Joints .
- ضفيرة توصيل Wiring Harness .
- دوائر تلفزيونية مغلقة Closed Circuit Televisions .
- نظام الحماية الحرارية Thermal Protection System .
- أذرع Booms .
- المستجيبات الطرفية End Effectors .
- نظام التحكم SRMS Control System .
.
المفاصل Joints
يتكون كل مكون تجميع فرعي في نظام SRMS من عنصر أساسي يسمى مفصل ذو درجة حرية واحدة أو اختصارا JOD .
هناك اثنين من JODs في مفصل الكتف Shoulder Joint ، مما يسمح للذراع بأكمله بحركة الميل Pitch وحركة الدوران Yaw .
يوجد JOD في مفصل الكوع Elbow Joint للسماح للذراع السفلي Lower Arm بحركة الميل Pitch . يوجد ثلاث JODs أخري في مفصل الرسغ تسمح لطرف الذراع بحركة الميل Pitch وحركة الدوران Yaw وحركة Roll .
يمكن أن يتحرك SRMS بحرية أكبر من ذراع الإنسان لإنجاز مهام رجل معقدة للغاية.
يحتوي كل JOD أيضًا علي جهاز يسمى المشفر Encoder ، والذي يقيس زوايا المفصل بدقة Joint Angle .
صورة متحركة Animation – حركة الذراع Pitch – اضغط للمعاينة
.
صورة متحركة Animation – حركة الذراع Yaw-Roll – اضغط للمعاينة
.

يحتوي المستجيب الطرفي End Effector علي وصلات للطاقة والبيانات بحيث يكون الذراع قادرًا على الانفصال Detach عند أي من الطرفين
.
الأذرع Booms
هي ذراع التطويل العلوية Upper Boom والذراع السفلية Lower Boom الواصلة بين مفصل الكتف Shoulder Joint و مفصل الكوع Elbow Joint و مفصل الرسغ Wrist Joint وهي مصنوعة من الجرافيت – الإيبوكسي Graphite-Epoxy .
.
يبلغ طول الذراع العلوي Upper Boom حوالي 5 أمتار وقطره 33 سم . يتكون من 16 طبقة من الجرافيت الإيبوكسي ويزن حوالي 23 كجم.
.
يبلغ طول ذراع التطويل السفلية Lower Boom حوالي 5.8 أمتار وقطرها 33 سنتيمترًا ، ويتكون من 11 طبقة من الجرافيت-الإيبوكسي ويزن حوالي 22.7 كجم.
.
كل ذراع تطويل محمية بواسطة واقي صدمات Kevlar Bumper مصنوع من مادة الكفلر KEVLAR لمنع الخدوش أو الإنبعاجات في طبقات مركب الكربون.
.
ضفيرة التوصيل Wiring Harness
توفر ضفيرة التوصيل Wiring Harness الطاقة الكهربائية لجميع المفاصل Joints والمستجيب الطرفي End Effector (اليد الميكانيكية) بالإضافة إلى البيانات والمعلومات الواردة من كل مفصل. يصل هذا الرابط من SRMS في حاوية الحمولة Payload Bay ويستمر إلي أن يصل إلى مقصورة المكوك الفضائي حيث يتحكم رواد الفضاء في حركة الذراع عن بعد.
.
المستجيبات الطرفية End Effectors
على مدار ثلاثة عقود ، كان Canadarm هو العمود الفقري متعدد الاستخدامات لبرنامج المكوك الفضائي Space Shuttle Program ، وهو مثالي للتعامل مع الحمولات الكبيرة ، وللوصول إلى جميع أنحاء المكان للنظر إلى الجانب السفلي من المكوك ولعمله كمنصة Platform لمشاة الفضاء Space Walkers . كانت الميزة الرئيسية في التصميم الأصلي هي “المستجيب الطرفي End Effector” ، والذي مكّن الذراع من إحكام الإمساك بأي شيء تم تزويده بتجهيزة معدنية قياسية Standard Metal Grapple Fixture . سمح التصميم المبتكر لرائد فضاء بتوجيه الذراع قريبًا بما يكفي لهدفه لإخراجه دون إرساله.
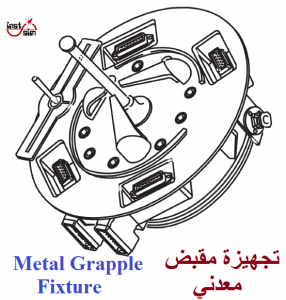
أولاً ، يقترب المستجيب الطرفي End Effector من التجهيزة المعدنية أو المقبض Grapple بكوابل الصيد الثلاثة التي تشكل مثلثًا مفتوحًا لمنح مشغل الذراع هامشًا معقولًا للعمل معه. بمجرد أن تكون نهاية أداة التثبيت في داخل المثلث ، يتم تدوير الكابلات للإغلاق من حولها.
صورة متحركة Animation – كيف يعمل المستجيب الطرفي End Effector – اضغط للمعاينة
.
بعد ذلك ، يتراجع الجزء الداخلي من المستجيب الطرفي End Effector ، مما يسحب مشابك التثبيت لإحكام اتصال قوي. في كندارم Canadarm2 ، يحتوي المستجيب الطرفي End Effector علي وصلات للطاقة والبيانات بحيث يكون الذراع قادرًا على الانفصال Detach عند أي من الطرفين.
.
فبدلاً من اليد ، يحتوي كندارم Canadarm على مستجيب طرفي End Effector أسطواني الشكل يسمح للذراع بالتقاط الحمولات الثابتة أو حرة الحركة في الفضاء . ويعمل كطوق التقاط كبير وآلية قادرة على الالتحام الناعم والإمساك بالحمولات الصلبة.
.
على سبيل المثال ، عندما الحاجة لنشر أحد مكون محطة الفضاء الدولية من داخل حاوية الشحن Cargo Bay الخاصة بالمكوك ، مثل هيكل الجملونات المتكامل Integrated Truss Structure والذي يبلغ وزنه 17 طنًا والذي يحتوي على زوج من المصفوفات الشمسية Solar Arrays العملاقة ، ، يجب على رائد الفضاء الذي يشغل Canadarm أولاً ضبط الذراع الآلي بحيث تحكم الكابلات الموجود داخل المستجيب الطرفي وتسحب المقبض المعدني المثبت علي بنية الجمالون الكبيرة.
.
الدائرة التلفزيونية المغلقة Closed Circuit Television
يقوم نظام تلفزيوني مغلق الدائرة يتكون من كاميرات وأضواء مثبتة على الذراع وفي حاوية الشحن Cargo Bay بنقل الصور إلى الشاشات الموجودة بداخل محطة الفضاء لمساعدة رواد الفضاء.
.
نظام التحكم SRMS Control System
يتحكم كمبيوتر الأغراض العامة (GPC) الخاص بالمكوك الفضائي Space Shuttle في حركة SRMS. حيث أن ذراع التحكم Hand Controllers التي يحركها رائد الفضاء تخبر الكمبيوتر بما يريده رواد الفضاء من الذراع الروبوتية.
.
أثناء قيام الكمبيوتر بإصدار أوامر لكل مفصل من المفاصل ، فإنه يراقب كل مفصل كل 80 مللي ثانية. وأي تغييرات يدخلها رواد الفضاء على المسار الأولي المطلوب يتم إعادة فحصها وإعادة حسابها من قبل GPC ثم يتم إرسال الأوامر المحدثة إلى كل المفاصل. و عند حدوث مشكلة ، يقوم كمبيوتر GPC بتفعيل المكابح تلقائيًا على جميع المفاصل وإخطار رائد الفضاء بحالة المشكلة.
.
كما هو الحال مع أي نظام تحكم ، يمكن تجاوز GPC ويمكن لرائد الفضاء تشغيل المفاصل كل علي حدة من كابينة التحكم Flight Deck .
.
نظام الحماية الحرارية Thermal Protection System
تعمل بطانية معزولة بيضاء وملائمة مع سخانات يتم التحكم فيها حرارياً لإبقاء الكندارم Canadarm في درجات حرارة مقبولة في الفضاء المفرغ من الهواء ، وحماية مكوناته من الحرارة الشديدة لأشعة الشمس ، أو من البرد الشديد عندما يكون الذراع في الظل.
.
التنقل بالنهاية إلي النهاية End to End Mobility
يمنح هذا التصميم الكندارم Canadarm القدرة الفريدة للتجول حول المحطة من تلقاء نفسه ، والانتقال بطريقة نهاية وراء نهاية End-Over-End باستخدام المقابض المعدنية الكهربية الموزعة Power Data Grapple Fixtures علي الجسم الخارجي لمحطة الفضاء الدولية .
.
ولد مفهوم نهاية وراء نهاية End-Over-End في وقت مبكر أثناء تطوير الكندارم Canadarm. وأدرك المهندسون أن الذراع ستحتاج إلى حركة إضافية للوصول إلى جميع أجزاء المحطة الفضائية وهذا الإحتياج أكثر منه في حالة استخدام الكندارم Canadarm علي متن المكوك حيث يكون موصول من نهاية واحدة بالمكوك.
*
اضغط هنا لتتابع صفحتنا علي الفيس بوك و
و 
***************************************************************

مواضيع ذات صلة
.
الصفحة الرئيسية لمقالات الفضاء
*
المسبار القمري الصيني إلي الجانب المظلم من القمر
*
جديد المسبار القمري الصيني إلي الجانب المظلم من القمر
*
المسبار القمري الإسرائيلي
*
جديد مسابير الفضاء New Space Porbes
*
البعثة الفضائية إنسايت InSight لاستكشاف باطن المريخ
*
مسبار أوسايرس-ركس OSIRIS-Rex إلي الكويكب بينو Bennu
*
إطلاق أصغر الصواريخ الحاملة للأقمار الصناعية في العالم
.
الوسوم:ISS, Space, الفضاء, فضاء
**************************************
ملاحظة
- إذا كان لديك مقالة تريد نشرها أو لديك تعديل أو اقتراح جيد ، فمن فضلك سجل اقتراحك في تعليق علي الموضوع .
- أو راسلنا
 علي البريد التالي لنشر مقال خاص بك : info@inst-sim.com
علي البريد التالي لنشر مقال خاص بك : info@inst-sim.com
مكتبة محاكاة الأجهزة
